“无线遥控智能爬行机器人”设计
? 第一篇 机械课程设计??摘要
? 第二篇 机械课程设计??机构(硬件)设计
2.1 项目背景及意义
2.2 肢体的机构设计
2.3 躯体的机构设计
? 第三篇 机械课程设计??步态分析及其实现
? 第四篇 机械课程设计??通信电路设计? 第五篇 机械课程设计??技术应用软件
? 第六篇 机械课程设计??参考书目
? 第七篇 机械课程设计??《附录》
? 第八篇 机械课程设计??心得,体会&意见,建议
第一篇 机械课程设计??摘要
机器人是机构学、运动学、控制理论等学科发展水平的综合体现,是当前国内
外研究的热点问题之一。在各高校机器人设计活动也已经很广的开展起来,我想这
种氛围对我国机器人的研制开发特别以及专业方面人才的培养是具有积极意义的。
我们是制作机器人的爱好者,“无线遥控爬行机器人”是我们设计的第一个机器
人,从仿生学的角度,昆虫的生理构造及行为是比较容易模仿的,我们的机器人正是
在模仿四足行走的动物,该机器人是一个仿生4足行走的机器人,通过对伺服马达的
精确控制模拟四足动物的行走步态,实现行走、急跑、转弯等各种步态行为,并能在各
种地面环境下进行步态的智能调整,自适应光滑地面、粗糙地面、沙石地面、湿泥地面
等恶劣的路面环境。
该系统通过AT89S51、USB100模块、NT-TR01无线传输模块及相应的辅助电路实现
智能控制及无线遥控。NT-TR01采用DDS+PLL频率合成技术,频率稳定性极好,且功耗
小, 工作频率为国际通用的数传频段433MHz。
PC端通过USB接口与NT-TR01模块连接,远程控制端单片机与NT-TR01模块连接,
实现数据的双向传输。PC向终端发送控制指令并处理反馈来的状态信息,终端执行指令
并反馈状态信号。
最后进行了系统联合调试,结果表明:系统的软、硬件设计合理可行,为后续的研究
工作奠定了基础。
关键词:仿生学,AT89S51,USB100,NT-TR01,无线传输,PC,终端,反馈,DDS+PLL
第二篇 机械课程设计??机构(硬件)设计
2.1 项目背景及意义
仿生机器人(Humanoid Robot)是先进机器人技术的高级发展阶段,它综合体现
了高级机器人的机构学、运动与动力学、现代设计理论、信息检测和感知、微电子学、
控制理论等诸多方面的研究和发展水平,是一个复杂的综合系统。图2-1是我们研制的
机器人三维模拟图。
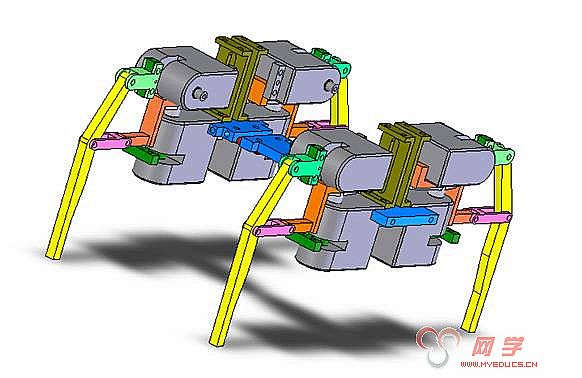 |
图2-1 “无线遥控爬行机器人”三维模拟图
大学生科研训练计划(Student Research Training Program---SRTP)是我校大力
开展本科教育改革,实施理论教学、实践教学、科学研究三位一体教学模式的重要组成
部分,其目的是组织学生在教师的指导下,通过自主进行课题研究和探索。了解和掌握
基本的科学研究方法和手段,培养大学生严谨的科学态度、创新创业意识和团队合作精
神,提高大学生的研究创新能力和综合实践能力。
“无线遥控爬行机器人”正是东南大学 SRTP项目之一,机器人的开发是来源于学生
的兴趣爱好,在指导老师的制导下完成机器人的开发。
2.2 肢体的机构设计
2.2-1 微型伺服马达的机构
我们的机器人是由8个微型伺服马达驱动,整个机器人的机构设计也是以微型伺服马
达为基础的,所以在介绍机器人的机构设计前我想把微型伺服马达的机构及工作特性作一
下介绍。
微型的伺服马达在无线电业余爱好者的航模活动中使用已有很长一段历史,而且应用
最为广泛,国内亦称之为“舵机”,含义为:“掌舵人操纵的机器”。可见,微型伺服马达主
要用作运动方向的控制部件。伺服马达本质上是可定位的马达。当伺服马达接受到一个位
置指令,它就会运动到指定的位置。因此,个人机器人模型中也常用到它作为可控的运动
关节,这些活动关节我们也常称它为自由度
一个微型伺服马达内部包括了一个小型直流马达;一组变速齿轮组;一个反馈可调电
位器;及一块电子控制板。其中,高速转动的直流马达提供了原始动力,带动变速(减速)
齿轮组,使之产生高扭力的输出,齿轮组的变速比愈大,伺服马达的输出扭力也愈大,也
就是说越能承受更大的重量,但转动的速度也愈低。我们正是依靠伺服马达的两个输出转
矩作为驱动的来源。图2-2是我们所用微型伺服马达的三维模拟图
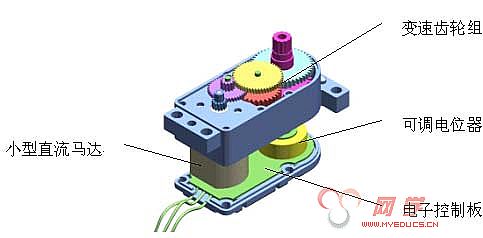
图2-2微型伺服马达的三维模拟图
2.2-2 爬行机器人的的肢体机构设计流程
我们的设计是从4足机器人的一个肢体开始的,因为4个肢体的设计是非常相似的。
为了能够充分利用伺服马达的输出转矩,我把马达输出的转臂就作为机器人的肢体的组
成部分,这样就大大提高了输出功率的利用率。想到四足动物的步行状态,即做上下摆
动和前后摇动,我开始把一个肢体的机构设计如下:
图2-3肢体的单电机机构
我们通过下面电机的转动带动上面齿轮臂的转动,进而带动圆住凸轮的转动并把它的
 圆周运动转化为上连杆的摆动,再带动其它关节的转动。其结构间图如下:
圆周运动转化为上连杆的摆动,再带动其它关节的转动。其结构间图如下:
图2-4肢体的单电机运动间图
由于此机构的运动比较单一,而且在运动的协调性上不易控制我们最后选取了双电机机
构。通过上下两个电机的独立转动带动肢体关节转动,这样在机器人行走的过程中就可
以比较协调,而且我们的机器人的自由度也将增加,具体的协调性分析及其行走的步态
分析将在下面作详细介绍。
图2-5肢体的双电机机构及其机构运动间图
这样通过两个 PWM 信号分别控制上下两个电机就可以比较轻松的实现一个肢体的
“抬高”和“迈进”。通过4个肢体的协调工作我们就可以控制机器人的行走(前进,后
退,转身等)。另外,在我们的考虑到我们的机器人实际工作环境时,想到了如果它在行
走的过程中翻身了怎么办?所以在原有双电机的机构基础上我们加以了改进,那就是在原
 来肢体上再加镜向关节。(如图2-6)这样在机器人翻转180度后依然可以利用上面的镜向
来肢体上再加镜向关节。(如图2-6)这样在机器人翻转180度后依然可以利用上面的镜向
图2-6肢体的双电机含镜向关节机构
关节行走。最后通过我们小组的讨论,图2-6的机构在可行性上有一定限制(机器人在
翻身后未必翻到180度,这样上关节就起不到),即无法充分可靠的利用镜向关节最后
我们放弃了这个方案。希望在以后的设计中能够想到更好的方案。所以最后我们采用的
还是图 2-5的双电机无镜向关节的机构。
2.3 躯体的机构设计流程
躯体是连接四个肢体的关键部分,躯体的结构设计也显得十分重要,我们从电机的结
构出发,结合实际四足动物的形体特征,我们的躯体设计经过以下几个阶段:


图2-7躯体机构的实际流程图
图2-7躯体机构的三维图
通过最后的躯体机构我们就可以把四个双电机肢体很好的连接在一起了,并且通过
最后改进的躯体梁结构,我们可以让机器人有充分的灵活性,这主要是“中间轴”和两
 个“铰链”的作用。
个“铰链”的作用。
图2-7整体机构图(主视)
最后把躯体和四个肢体通过螺钉紧固在一起,这样机器人的整体机构就组合好了,
过控制8个伺伏电机就可以让它“行动自如”了。
