�����߰�������ѧ����ѧ����Ϊ���ṩ ������б�¿��ƺͱ��Ͽ��ƹ��ܵ�ʵ�� �ο���������� ������б�¿��ƺͱ��Ͽ��ƹ��ܵ�ʵ�� ѧϰ�й����е����⣬�ο�ѧϰ��
�����߱��˹����ܵĻ�������Ŀǰ�������о�����ķ�չ����������һ������˼�����ж������Ļ����ˣ�Ҳ�ὥ�����������ǵ���Χ�� ������ʵ�Ļ����µ����ܻ����ˣ��������ϰ�����Ϣ��δ֪�ģ�����ͨ�����Ƚ����û�����ͼ�������� GPS ��֪�������ϰ�����Ϣ����������������ϵͳ������£�ϣ������һ�����������ϵͳ�ܹ����û����в������˽������Ϣ�������ڿ��ƻ������ж��Ĺ��������������⣮ ��һΪб�¿��ƹ��ܣ�������֪��Ŀ���뷽��ͨ����ʱ����·����б�̶ȣ�������ֻ��ƽ�ȵ���ǰ�ƶ��������˻����·����б�̶ȸ����ʵ������أ��û�������б����Ҳ�����ɵ�ʹ���ж������ҿ��Ƶ���ָ����Ŀ���; ���Ϊ���Ͽ��ƹ��ܣ�������֪��Ŀ���뷽��ͨ����ʱ���ջ�����Ϣ�������ʵ��IJο��㣬���ж�������ֻ��ƽ�ȵ���ǰ�ƣ������˽������ʵ���ɷ����������˳�������ϰ��ﵽ��Ŀ��㣮
����1 ���ڻ��������ж�����
�������о����ص��������ô������ռ����Ļ�����Ϣ���� PIC16F84 ��������Ϊ���Ŀ��Ƶ�Ԫ����Ͽ���ϵͳ���Դﵽʵʱ���ơ����Ƶ�Ч����
����1�� 1 ������ģ
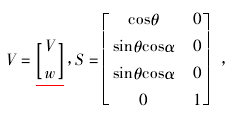
�������������õ���һ�����ṫ˾��Ƶļ����ܻ����� AIBO ģ�ͣ� ����������ӱ�����������������ڿ��������£����ĸ���������ʾ AIBO��б���ϵ�״̬����( 1) ʽ:����

�������� xc��yc��zcΪ��������ת���ĵ����꣬θ Ϊ����ǣ����赱 AIBO ��б�����н�ʱ������������ϵͳ�� Z ��ת�� θ �ǣ��� X ��ת�� α �ǣ��� AIBO�����һ����������AIBO �������ٶ� v �����䳯���ƽ�У�v Ϊ AIBO �����ٶȡ�ω Ϊ��ת�ٶȣ� ͬʱ��AIBO �Ķ�̬���������ܵ�ʹ������ F���������ء�б���ϵ������Լ����������������ص�����£��� m Ϊ AIBO ������I Ϊ��ת��������r Ϊ�����Ӱ뾶��b Ϊ���־����һ�룬τrΪ����ɷ�����أ�τlΪ����ɷ�����أ�F Ϊ�˵�����λ Ϊ��������p Ϊ���������� Mx��MyΪ�������أ� ���У���Qr�͢�θc�������ּ����ֵĽ��ٶȣ�Kr�� Kl�����ֺ����ַǸ��ĵ�������������ģʽ��ʾ����:
������q = SV ( 2)
������V = AK + B ( 3)
������������
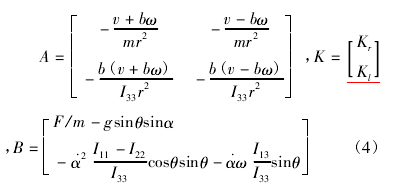
��ʱ������ K ��Ϊ����ϵͳ���¿�����������������ʵ��ص������������أ�����ʹ���ߴ���ʼλ�õ���ָ��λ�ã� ����� K ��ѡ��Ϊ�Ǹ�ֵʱ���� AIBO ���Ա���ģʽ���ƣ����� K Ϊ��ֵʱ���� AIBO ��������ģʽ���ƣ�
1�� 2 б��������ϵͳ
����ͨ��б��������ϵͳ����б���Ͽ�˳���ؿ���ʹ���ߵִ�Ŀ�ĵ��ҿɳ���ʹ����ϣ���ij���ǣ���v ���Ը���������Ƶ�·�����ã�����ģʽ���������������Ҫ��Ϊ���ҵ�һ�����·�����������ζ���ʽ����ʾб�º�������ʽ��ͨ��Ԥ����Ƹ�����б�¸߿ɵ�б�½Ƕȼ��������ͨ��б�½Ƕȿɵõ�б�³���
����1�� 3 ����������ϵͳ
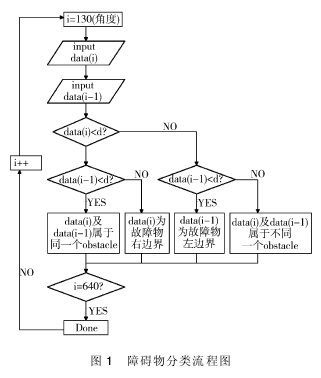
����ͨ������������ϵͳ������˳���ؿ���ʹ���������ϰ����ҵ���Ŀ�ĵأ� �˷�������������������ϵͳ�е�ģ��Ԥ����ƣ����ȣ��ȶ��崫����������ϵͳ���ڻ����˵�����ϵͳ�£���������λ���趨Ϊ( 0��3��0) ����λΪ�ף� ��������������ͼ1 �ķ�������ͼ�Ѿ�����Ϣ������ϰ�����Ϣ�� �����ϰ��������Ե�֪ÿһ���ϰ������ұ��Լ�����ߵIJ����ֵ���ٽ������ֵת����ȫ������λ�ã����ϰ����ľ�������������趨�ı߽�ֵ T ʱ����������Ϊ���������ҽ���������IJ����ֵ��¼������Ϊ������AIBO ���н������ϰ���İ�ȫ���룬���������ϰ���� AIBO ��Ӱ�췶Χ��ͨ�������趨�õ�Ŀ��㣬�Ƶ��õ�Ŀ�������Ӧ�IJ����ֵ�� �ڼ���ο�����ǰ������֪����Ŀ�꣬��Ŀ���� AIBO ����ͨ�������ÿһ�ʲ���ǵķ����������õ�ÿһ����Ŀ�������λ�ã� ����Ȩ�غ�ʽ���������ÿһ����Ŀ������꣮ �ٽ����д�Ŀ������������� ��ʱ�����������Ŀ����ܺ������ƫ��Ŀ����λ�ã���ͨ����Ŀ����ܺ��Լ�Ŀǰ AIBO �ij���ǣ��õ��ο���ĽǶȣ� ��������òο���Ƕȸ��������趨�IJο����복�ӵľ��룬������ο����λ�ã� �� AIBO �ڸ���ÿһ��������IJο�������������ռ��ɵ������趨��Ŀ��㡣
����
����2 ϵͳ�ܹ����
����ѡ�� Sony �����ܻ����� AIBO ��Ϊʵ��ƽ̨��������IJ����Ǵ���( Dell) VOST��O �ʼDZ����ԣ� �� PIC16F84 ��������Ϊ���Ŀ��Ƶ�Ԫ��AIBO ��λ�����ٶȵ���Ϣ��ͨ��������������ϴ��� PIC оƬ; �����˹���������Ϣ����ͨ����������Ӧ���������Ŵ��·�� PIC оƬ�ڽ�10bits AD ת���õ�; �����ÿ����һ��ȡ��ʱ�䣬�ͻ�ͨ�� ��S232 ץȡ PIC оƬ�ϵ����ϣ�ͬʱ���� PIC оƬ���˵����ش�С; PIC оƬ�ӵ���������������غ���ɷ���������ѹ��ϵ����� PWM ��ѹ�źţ���ͨ�� ��C ��ŵ磬ת������ȵ�ѹ�źţ� �� AIBO ��ɲ�����ǵ������ƣ�����ʹ�� Wonder Box Device Controller ת�������Ӧ�ĵ������뵽����ɲ�������Կ��Ʒ���ɷ�������أ� �� AIBO ������Ҳ�ǵ������ƣ�ʹ�� MotorController ת�������Ӧ�ĵ������뵽���
����3 ϵͳ��ģ����ʵ��
����3�� 1 ϵͳ��ģ��
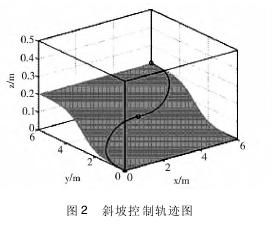
����Ϊ����֤���᷽���ɸ��ݻ����ı仯�ɹ��ؿ���ʹ���ߵ���ϣ����λ�û��dz���ǣ�����Matlab ģ�⣬������б��ģ��IJ��֣���ͼ 2 ��ʾ�������趨����: �Ľż���һ��Ϊ 0��029 5 m���ŵİ뾶Ϊ 0�� 006 05 m������������Լ 1�� 5 kg���������˷ֱ���� x��y��z ���ת���������ǹ���ֱ�Ϊ0�� 261 kg·m²��0�� 13 kg·m²�� 0�� 13 kg·m²���� x-z ��Ĺ���������Ϊ 0�� 087 kg·m²��
����
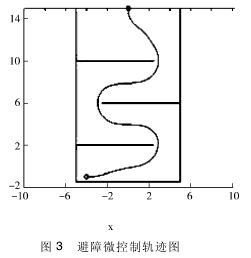
�����������DZ������ƵIJ��֣���ͼ 3 ��ʾ�������趨����: ���ּ�����һ��Ϊ 0�� 34 m�����ӵİ뾶Ϊ 0�� 061 6 m������������Լ 1�� 5 kg�������˶�����ת���ĵ�ת���������ǹ���Ϊ 1�� 1 ��0�� 55 kg·m²��
����
����3�� 2 ϵͳ��ʵ��
���������Ϸ���Ľ���������������������ܴﵽ��Ҫ�Ľ��������ʵ�������ģ����в�ͬ�����Ȳ���б��������ϵͳ�� ���������������ƽ�渨���IJ��֣���Ϊ��������ʹ���߷���������أ���˶���ʹ������˵�����ϴ�ͨ��б�¸�����ʹ�������� AIBO ��ʻ����·��ʱ���������൱��ĸ������������DZ�������ʵ��IJ��֣�Ϊ�˲��Ա��ϵ�ʵʱ�ԣ������������ǰ�����Щ�����ϰ�� ͨ����������ϵͳ��ͨ���켣ͼ������ʹ�����ܹ�˳���������ϰ��������Ч����ʹ���ߵ���ָ����λ�ü�����ǣ�
4 �� ��
�������о�б��������ʵ��������б����λ���Լ����������������Ϊ����Ϊб��·��IJ�ƽ˳����ɸв�������Ӱ��������Ч�������ǻ����ڿɽ��ܵķ�Χ�� ������������ϵͳ���棬ʵ������ʾ��λ�����ƽ��Լ 2��135% �����Ƕ����ƽ��Լ 10�� 427 5°����������������Ϊʹ����������Ӱ�죬�������������㷨�������ܹ�ȷ��������ʹ���ߵ���Ŀ��㸽�����Լ�����ϣ���ij���ǣ�
���������:
������1�� ���أ���ˣ� һ���������ܻ����˿���ϵͳ��ƣ�J�ݣ��Ƽ���Ϣ��2009( 1) : 470-471��
������2�� ����ϼ�� δ֪�����»�����·���滮�㷨��J�ݣ� ���ӿƼ���2013( 9) : 22-23��
������3�� ���Թ㣬���أ� ���� PIC ��Ƭ������������ϵͳ��ƣ�J�ݣ� ������ѧԺѧ����2009( 2) : 47-49��
������4�� ����� �� MATLAB �滮������·����J�ݣ� ��ɽѧ����2005( 4) : 38-39��
������5�� ���˲��� ���ڵ�Ƭ���������������ƣ�J�ݣ� ���ֻ���ѧԺѧ����2012( 11) : 100-103��
������6�� ����������־�������꣬�ȣ� Ӧ�� PIC ��Ƭ�����Ƶ��������ջ����ˣ�J�ݣ� �ִ����칤�̣�2010( 8) :156-162
